Un robot hecho con un cepillo de dientes que se mueve al azar y opera sobre el principio de vibración. Este proyecto de “robot simple” es fácil de hacer en casa, un proyecto ideal para hacer con los niños en un fin de semana. Este proyecto no requiere de muchos elementos: * Un cepillo de dientes. * Un motor de vibrador de un celular. * Una pila de botón. * Un pedazo de cinta de doble cara * Puede usar un poco de alambre de cobre para soldarlo al motor del vibrador.
Como pueden ver, este mini robot usa tan sólo un cepillo de dientes sin mango. Lo primero que se hacer es poner cinta de doble cara o pegamento en la parte superior del cepillo, seguidamente, montamos el motor y la pila en el mismo sitio (parte superior de éste), para luego enchufar el cable del motor a la batería. Eso es todo … El mini-robot está listo para funcionar.
Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexion USB.
Lo primero que hay que tener claro es que lo que tratamos de hacer es un ejemplo de como controlar diferentes circuitos y sensores desde nuestro PC, para ello hemos seleccionado algunos de los componentes mas populares en los robots y hemos realizado un programa modular en que se muestra como se controla todo. Los circuitos que incluye el robot son:
La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada mas, etc. En nuestro caso hemos puesto los necesario para que nuestro prototipo esté lo mas completo posible.
Una particularidad de todos los circuitos anteriores es que todos tienen conexión I2C que es una conexion tipo bus que solo necesita 2 hilos para interconectar todos los circuitos entre si. Todos los circuitos actúan como esclavos de un circuito principal llamado Master que es el que controlamos desde el PC y que en este caso se trata del circuito USBI2C. El master es el circuito que siempre inicia la conversación con el resto de los módulos, los esclavos, que lo que hacen es obedecer y contestar a las peticiones que hace el modulo master o principal.
De igual forma si lo que queremos es utilizar un solo componente y conectarlo al PC, necesitaremos utilizar el componente elejido junto con el circuito USBI2C. Por ejemplo si queremos conectar un display LCD03 al pc por USB, lo que hacemos es conectar el display al circuito USBI2C y luego este al PC mediante un cable USB. Para controlarlo utilizaremos el programa proporcionado en este ejemplo o directamente extraemos la parte que nos interesa y hacemos nuestro propio programa según nuestras necesidades ya que se incluye el programa fuente del mismo.
Se puede construir un insecto robot el cual imita de manera muy aproximada a un organismo biológico de forma artificial a partir de dos motorcitos, una pila batería y materiales de reciclaje.
PROCEDIMIENTO:
1-Dibujar el plano en la madera de contrachapado.
Plantilla para la base de la carcasa
2-Cortar las piezas.
3-Colocar los motores, en la base
4-Colocar los soporte de las antenas (sensores)
5- Colocar las chinchetas de conexión, y el cableado.
6-Formar el circuito. Uniendo el cable de las antenas, al motor y a la pila.
7-Poner las ruedas a los motores
8- Colocar las antenas (sensores) del insecto
9-Dibujar el plano de la carcasa o caparazón en una cartulina y recortarlos con unas tijeras.
10-Cubrir el caparazón con una capa de periódico impregnado en cola-agua dejar secar para que se endurezca.
PROBLEMA: Realizar un insecto robot que sortee obstáculos, utilizando materiales que se puedan encontrar fácilmente, así como cables motores eléctricos, pila batería como material eléctrico. OBJETIVOS:Diseñar circuitos eléctricos, conocer las características y funcionamiento de los motores eléctricos, aplicaciones de los sensores, y elementos de los robots. Objetivo General:Armar un insecto robot (mariquita), mediante la investigación, con la finalidad de aplicar los conocimientos de física y demás materias. Objetivos Específicos:-Investigar sobre el funcionamiento de un insecto robot. -Adquirir los materiales para el robot. -Armar el insecto robot. -Verificar el funcionamiento del insecto robot. MATERIALES:-Madera de contrachapado -Cola de carpintero -Cartulina -Ruedas de plástico -Cables de cobre -Periódico -Listones -temperas -chinchetas -Muelles-pila batería de 9 -Broche para pila batería
"Motores en vez de músculos y cables en vez de tendones, con plástico a modo de huesos y una capa de goma que recubre el invento como si fuese piel". Alguno podría pensar que esa descripción corresponde a un robot humanoide, similar al inquietante Ash de Alien, el octavo pasajero, y no le faltaría razón, aunque en este caso, la tecnología ha encontrado un modo más amable de hacer aparición. Con esa frase describe su autor a Dextrus, una mano robótica de bajo coste (aún sin piel), cuyas piezas están impresas en 3D y cuyos planos e instrucciones son libres y abiertos.
The Open Hand Project es la creación de Joel Gibbard, un joven británico licenciado en Robótica. Su intención era aplicar sus conocimientos para crear un objeto útil, con posibilidades y con la participación de toda la comunidad.Todos sus desarrollos están accesibles a través de internet para que el que quiera los use, los mejore o los complemente. "Me movía más que nada mi pasión por la robótica, pero intentar aplicarla a algo de lo que la gente se pudiese beneficiar me producía mucha satisfacción".
Dextrus es el resultado de ese proyecto, la mano. Si este tipo de prótesis puede alcanzar las decenas de miles de dólares, Dextrus puede fabricarse por menos de mil dólares, una cantidad más asequible para la mayoría. Está pensado para aportar todas las funcionalidades de una mano humana y orientado a los que han perdido un miembro en un accidente o por una enfermedad. Pero también para investigadores que quieran trabajar sobre las posibilidades de estos dispositivos o incluso artistas o desarrolladores que los usen en sus proyectos.
La mano Dexterous de Shadow es una avanzada mano robótica que posee 24 movimientos (y 20 Grados de Libertad), gracias a los que emula de forma fiable a una mano humana. Las ventajas de esta mano para investigación son:
24 movimientos y 20 Grados de Libertad.
Misma forma que una mano humana.
Hasta 129 sensores en toda la mano (posición, fuerza, presión, tacto,…).
Completa integración en ROS que permite comenzar a trabajar con ella de inmediato.
EtherCAT (100Mbps bus basado en Ethernet).
Plataforma ideal para integración e investigación.
Diseño flexible que permite su integración en otros sistemas robóticos.
Apoyo y desarrollo.
Puede ser utilizado en tele-operación o como parte de un sistema formado por brazos robots.
Cómo construir una prótesis robótica adaptada a las necesidades del individuo y por la fracción del costo de las alternativas que hay en el mercado.
Eso fue lo que llevó a Joel Gibbard, ganador de los prestigiosos premios de tecnología James Dyson, a crear una mano robótica hecha en base a tecnología de impresión 3D que pretende llevar esta tecnología a todo el mundo.
Gibbard, del proyecto Open Bionics, señala que puede escanear a una persona a la que se le ha amputado un brazo usando una impresora 3D y construirle una mano a la medida en menos de dos días.
El proyecto usa una impresora 3D para construir las partes que constituyen la mano robótica.
Normalmente, la creación de un prótesis similar toma meses.
Gibbard dijo a la BBC que piensa poner esta prótesis en el mercado el año próximo.
"La mano es básicamente un esqueleto con una especie de piel por encima. Así que podemos hacer diferentes cosas con ella, como decorar esta especie de piel con dibujos interesantes, cambiar el estilo y el diseño. Hay espacio para mucha flexibilidad", explicó.
Otro atractivo de esta mano es el precio, estimado en alrededor de US$3.000 dólares. Prótesis de manos similares con control de los dedos cuestan de US$20.000 a US$60.000.
Este prototipo tiene como principal objetivo ayudar
al aprendizaje de personas que tienen deficiencia
auditiva, descrito de una mejor manera personas
que siempre carecieron del sentido auditivo,
mediante el diseño y la construcción de una mano
robótica, capaz de realizar las señas del alfabeto
dactilológico y que interactué con la persona mediante
el reconocimiento de señas capturadas por
una cámara web, para su posterior procesamiento
por visión artificial en la plataforma de desarrollo
National Instruments Labview 2009 todo esto en
tiempo real.
La mano robótica será formada por diecisiete
servomotores, para lograr los movimientos y los
grados capaces de realizar una seña. Sus aplicaciones
son innumerables ya que el prototipo esta
desarrollado modularmente, cada parte puede ser
aplicada en otros sistemas como el reconocimiento
de imágenes, el control de servomecanismos,
sistemas mecánicos. El prototipo como tal puede
ser aplicado en el desarrollo de prótesis, manipulación
de objetos mediante guantes sensoriales,
estudios de señales biomecánicas para el control
de la mano, etc.
Para desarrollar una mano robótica fiable y hábil primero hay que comprender cómo se mueven laséextremidades humanas para despus reproducirlas y conseguir movimientos más naturales. El proyecto Handle desarrollado por diversas universidades europeas entre la que se encuentra la Universidad Carlos III de Madrid (UC3M) está desarrollando una mano artificial antropomórfica articulada superdesarrollada.
Perder una mano no es algo habitual pero tampoco es algo excesivamente fuera de lo común. Además de eventos inesperados como accidentes de tráfico, ciertas enfermedades desembocan en la amputación de extremidades lo que impide a muchas personas llevar una vida completamente normal. Por eso, el proyecto Handle está desarrollando una mano artificial lo más autónoma, natural y eficaz posible.
Para ello los investigadores han buscado comprender cómo realizan los humanos la manipulación de objetos para reproducir el agarre y las habilidades de esta extremidad. Como explica el investigador principal del equipo de la UC3M implicado en el proyecto, Mohamed Abderrahim, "además de los avances tecnológicos perseguidos, se trabaja con aspectos fundamentales de la investigación multidisciplinar, con el fin de dotar al sistema de mano robótica con capacidad de percepción avanzada, control de alto nivel de información y elementos de inteligencia que permitan el reconocimiento de objetos y el contexto de las acciones".
A sólo unos minutos de la frontera entre Estados Unidos y México, en la ciudad de Tijuana, unos ingenieros mexicanos lideran aquí una tecnología que echará a volar tu imaginación. Literalmente. Dentro de la planta de3D Robotics - a unos pasos de la Universidad Autónoma de Baja California, su alma mater - Guillermo Romero dirige la logística de la producción de drones, esos vehículos sin tripulación que han captado el interés de compañías como Amazon, de aficionados a la tecnología y hasta de los gobiernos. Pero pronto, asegura Romero, los drones tendrán muchas otras utilidades y no solamente servirán para hacer entregas a domicilio, llevar a cabo operaciones militares o para que los gobiernos nos espíen.
"El mundo de radiocontrol ya tiene años de existir y ya con eso se podría espiar. No hay que tenerle miedo", dijo Romero haciendo alusión a las preocupaciones que tienen algunas personas sobre los posibles usos de los drones y explica que se están cambiando las leyes para reforzar la privacidad. "Qué bueno que la gente se esté quejando para que así los legisladores presten atención".
Tal vez por la controversia alrededor de los drones, el interés en estos aparatos voladores sigue creciendo y 3D Robotics busca aprovechar ese interés para llevar al mercado drones de manera más asequible y contribuir a que su uso sea menos controversial.
Los vehículos aéreos sin tripulación (Unmanned Aerial Vehicles, o UAV por sus siglas en inglés) son dispositivos eléctricos voladores controlados por control remoto. Los drones se pueden usar simplemente para entretenimiento - como tener un carro a control remoto - o se pueden usar para grabar video y tomar fotografías aéreas. 3D Robotics actualmente vende cinco modelos, siendo los más populares el Iris (que tiene cuatro motores y vale US$750), el Y6 (con seis motores y un precio de US$900) y el X8 (de ocho motores y con valor de US$1,200).
Según Romero, su compañía fabrica 300 drones ya listos para volar cada mes, además de 2,500 componentes que los aficionados piden para armar sus propios drones. Pero creen que aún pueden crecer más, pues como dice Romero, no trabajan aún a máxima capacidad.
Con sede en Berkeley, California, con una oficina administrativa y de distribución en San Diego y la planta en Tijuana, 3D Robotics tiene un total de 180 empleados y más de 28,000 clientes a nivel mundial que usan sus drones para agricultura, fotografía, construcción, servicios de emergencia, estudios ecológicos o simplemente para entretenimiento.
Sin embargo, no todos los usos que se le puedan dar a un drone tienen que ver con operaciones peligrosas o industriales, ya que recientemente se han introducido al mercado modelos más simples diseñados con el propósito de comercializarse en ámbitos más ligados a la recreación y al tiempo libre como la fotografía, el video, o los juegos de realidad aumentada.
En este sentido, uno de los juegos más interesantes que se realizan con drones son los llamados Grand Prix Aéreos, muy populares en USA y en Francia, y en donde el vehículo no tripulado tiene que sortear una serie de obstáculos a alta velocidad.
En el ámbito del video y la fotografía se han comenzado a usar drones para montar cámaras y así poder tomar fotografías aéreas de bodas y otros acontecimientos sociales, tal como ocurrió en el pasado mundial de futbol 2014, con sede en Brasil, en el cual los drones se usaron en parte para la televisación del juego y también para el control e identificación de problemas entre la multitud de los asistentes.
Como comentábamos más arriba en este artículo, los drones son utilizados para el control, manipulación y limpieza de materiales nocivos o contaminantes. En el caso de desastres acontecidos en centrales nucleares como el ocurrido en Fukushima, Japón, y deban limpiarse los materiales radiactivos liberados al aire, los drones podrían cumplir con esta responsabilidad sin comprometer de modo alguno la vida humana. Lamentablemente para la fecha en que ocurrió el desastre en Japón, esta tecnología todavía no estaba muy desarrollada, sin embargo se han utilizado drones como el T-Hawk para tomar fotografías del estado en que se encontraban los reactores.
La utilización de este T-Hawk fue crucial para obtener una vista detallada del estado del interior del reactor y obtener fotografías y otros datos con los cuales poder estimar los daños producidos y así elaborar un plan de limpieza y contención de futuras fugas. Cabe destacar que todos estos informes no se hubieran podido lograr de otra forma, ya que para los seres humanos es imposible sobrevivir a este nivel de radiación.
Una de las tecnologías que más destacan y llaman la atención de todos en estos últimos años son los llamados drones, pequeños aparatos voladores no tripulados y que pueden ser controlados en forma remota. Obviamente que un dispositivo de estas características sorprendería a cualquiera que alzase su cabeza y lo viera sobrevolando la ciudad presto a la entrega de un paquete o realizando tareas de vigilancia, todo un digno espectáculo de ciencia ficción, que no es para nada ficción.
Desarrollados y puestos en servicio hace unos muy pocos años, los drones pueden ser usados en infinidad de tareas que el humano no puede o no quiere realizar, o simplemente son demasiado peligrosas como la exploración o la limpieza de residuos tóxicos, y como no podía ser de otro modo, para fines bélicos.
También son extremadamente útiles para el control de incendios forestales, la geología, la agricultura, la construcción, y el control y análisis de tráfico en las grandes ciudades, entre muchas otras tareas, ya que son muy económicos de operar, prácticamente no requieren de insumos o combustibles para su operación y no ponen en peligro las vidas de quienes lo pilotean.
Pero además el propio drone tiene un valor por lo menos 60 veces inferior a un helicóptero. En este sentido, la flexibilidad y la posibilidad de poder controlar a este ingenio a distancia manteniéndose su operador fuera de peligro, es la respuesta adecuada a este tipo de situaciones.
No creas que estás leyendo la enésima investigación sobre extremidades mecanizadas que nos van a convertir en Robocop. Esta vez el avance es muy grande porque la mano creada por el consorcio investigador europeo LifeHand 2 ha creado una que no sólo obedece las órdenes mecánicas de su poseedor, sino que es capaz de sentir las texturas y durezas, determinar las formas y tamaños, y sentir la temperatura.
Es decir, es la que mejor reproduce el tacto humano de todas las que se han creado hasta ahora. Es lo que llaman una mano prostética. Lo ha conseguido Sanisa Raspopovic, del Instituto de Bio-Robótica de la Escuela Superior de Santa Ana (Pisa, Italia), en asociación con otros centros de Suiza, Alemania y Dinamarca.
En las fotos publicadas por la revista Science Translational Medicine, no hay más que ver las cara de felicidad del trasplantado, el danés Dennis Aabo Sorensen, para comprender el enorme avance de esta tecnología. El paciente perdió una mano hace diez años manipulando fuegos artificiales y recientemente se le ha implantado esta prótesis que se aproxima en funcionamiento a una de carne y hueso.
El sistema funciona del siguiente modo: en una cirujía previa, los investigadores implantaron primero microelectrodos en el sistema nervioso del paciente. Después implantaron la mano y estimularon mediante impulsos eléctricos las fibras sensoriales que aún quedaban en el muñón del Dennis. Una vez establecida la "comunicación" entre la mano robótica y el cerebro, comenzaron a imponer tareas al paciente con los ojos vendados para que asegurarse de que la información sobre los objetos que manipulaba llegaba exclusivamente mediante el tacto.
Los investigadores aclaran que aún se está lejos "de conseguir una versión comercial de esta prótesis porque los electrodos que hay que implantar son demasiado grandes aún" y porque no está claro si puede haber efectos secundarios de su presencia en el sistema nervioso a largo plazo (en este primer ensayo se ha esperado con éxito un solo mes).
 Un robot hecho con un cepillo de dientes que se mueve al azar y opera sobre el principio de vibración. Este proyecto de “robot simple” es fácil de hacer en casa, un proyecto ideal para hacer con los niños en un fin de semana.
Un robot hecho con un cepillo de dientes que se mueve al azar y opera sobre el principio de vibración. Este proyecto de “robot simple” es fácil de hacer en casa, un proyecto ideal para hacer con los niños en un fin de semana. 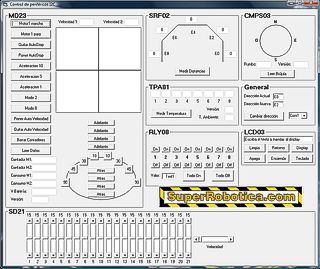 Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexion USB.
Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexion USB. La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada mas, etc. En nuestro caso hemos puesto los necesario para que nuestro prototipo esté lo mas completo posible.
La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada mas, etc. En nuestro caso hemos puesto los necesario para que nuestro prototipo esté lo mas completo posible. De igual forma si lo que queremos es utilizar un solo componente y conectarlo al PC, necesitaremos utilizar el componente elejido junto con el circuito USBI2C. Por ejemplo si queremos conectar un display LCD03 al pc por USB, lo que hacemos es conectar el display al circuito USBI2C y luego este al PC mediante un cable USB. Para controlarlo utilizaremos el programa proporcionado en este ejemplo o directamente extraemos la parte que nos interesa y hacemos nuestro propio programa según nuestras necesidades ya que se incluye el programa fuente del mismo.
De igual forma si lo que queremos es utilizar un solo componente y conectarlo al PC, necesitaremos utilizar el componente elejido junto con el circuito USBI2C. Por ejemplo si queremos conectar un display LCD03 al pc por USB, lo que hacemos es conectar el display al circuito USBI2C y luego este al PC mediante un cable USB. Para controlarlo utilizaremos el programa proporcionado en este ejemplo o directamente extraemos la parte que nos interesa y hacemos nuestro propio programa según nuestras necesidades ya que se incluye el programa fuente del mismo.

 - Madera de contrachapado
- Madera de contrachapado - pila batería de 9
- pila batería de 9  - Madera de contrachapado
- Madera de contrachapado - pila batería de 9
- pila batería de 9 

 "Motores en vez de músculos y cables en vez de tendones, con plástico a modo de huesos y una capa de goma que recubre el invento como si fuese piel". Alguno podría pensar que esa descripción corresponde a un robot humanoide, similar al inquietante Ash de Alien, el octavo pasajero, y no le faltaría razón, aunque en este caso, la tecnología ha encontrado un modo más amable de hacer aparición. Con esa frase describe su autor a Dextrus, una mano robótica de bajo coste (aún sin piel), cuyas piezas están impresas en 3D y cuyos planos e instrucciones son libres y abiertos.
"Motores en vez de músculos y cables en vez de tendones, con plástico a modo de huesos y una capa de goma que recubre el invento como si fuese piel". Alguno podría pensar que esa descripción corresponde a un robot humanoide, similar al inquietante Ash de Alien, el octavo pasajero, y no le faltaría razón, aunque en este caso, la tecnología ha encontrado un modo más amable de hacer aparición. Con esa frase describe su autor a Dextrus, una mano robótica de bajo coste (aún sin piel), cuyas piezas están impresas en 3D y cuyos planos e instrucciones son libres y abiertos. La mano Dexterous de Shadow es una avanzada mano robótica que posee 24 movimientos (y 20 Grados de Libertad), gracias a los que emula de forma fiable a una mano humana. Las ventajas de esta mano para investigación son:
La mano Dexterous de Shadow es una avanzada mano robótica que posee 24 movimientos (y 20 Grados de Libertad), gracias a los que emula de forma fiable a una mano humana. Las ventajas de esta mano para investigación son: Eso fue lo que llevó a Joel Gibbard, ganador de los prestigiosos premios de tecnología James Dyson, a crear una mano robótica hecha en base a tecnología de impresión 3D que pretende llevar esta tecnología a todo el mundo.
Eso fue lo que llevó a Joel Gibbard, ganador de los prestigiosos premios de tecnología James Dyson, a crear una mano robótica hecha en base a tecnología de impresión 3D que pretende llevar esta tecnología a todo el mundo. Este prototipo tiene como principal objetivo ayudar
al aprendizaje de personas que tienen deficiencia
auditiva, descrito de una mejor manera personas
que siempre carecieron del sentido auditivo,
mediante el diseño y la construcción de una mano
robótica, capaz de realizar las señas del alfabeto
dactilológico y que interactué con la persona mediante
el reconocimiento de señas capturadas por
una cámara web, para su posterior procesamiento
por visión artificial en la plataforma de desarrollo
National Instruments Labview 2009 todo esto en
tiempo real.
La mano robótica será formada por diecisiete
servomotores, para lograr los movimientos y los
grados capaces de realizar una seña. Sus aplicaciones
son innumerables ya que el prototipo esta
desarrollado modularmente, cada parte puede ser
aplicada en otros sistemas como el reconocimiento
de imágenes, el control de servomecanismos,
sistemas mecánicos. El prototipo como tal puede
ser aplicado en el desarrollo de prótesis, manipulación
de objetos mediante guantes sensoriales,
estudios de señales biomecánicas para el control
de la mano, etc.
Este prototipo tiene como principal objetivo ayudar
al aprendizaje de personas que tienen deficiencia
auditiva, descrito de una mejor manera personas
que siempre carecieron del sentido auditivo,
mediante el diseño y la construcción de una mano
robótica, capaz de realizar las señas del alfabeto
dactilológico y que interactué con la persona mediante
el reconocimiento de señas capturadas por
una cámara web, para su posterior procesamiento
por visión artificial en la plataforma de desarrollo
National Instruments Labview 2009 todo esto en
tiempo real.
La mano robótica será formada por diecisiete
servomotores, para lograr los movimientos y los
grados capaces de realizar una seña. Sus aplicaciones
son innumerables ya que el prototipo esta
desarrollado modularmente, cada parte puede ser
aplicada en otros sistemas como el reconocimiento
de imágenes, el control de servomecanismos,
sistemas mecánicos. El prototipo como tal puede
ser aplicado en el desarrollo de prótesis, manipulación
de objetos mediante guantes sensoriales,
estudios de señales biomecánicas para el control
de la mano, etc.



 Como comentábamos más arriba en este artículo, los drones son utilizados para el control, manipulación y limpieza de materiales nocivos o contaminantes. En el caso de desastres acontecidos en centrales nucleares como el ocurrido en Fukushima, Japón, y deban limpiarse los materiales radiactivos liberados al aire, los drones podrían cumplir con esta responsabilidad sin comprometer de modo alguno la vida humana. Lamentablemente para la fecha en que ocurrió el desastre en Japón, esta tecnología todavía no estaba muy desarrollada, sin embargo se han utilizado drones como el T-Hawk para tomar fotografías del estado en que se encontraban los reactores.
Como comentábamos más arriba en este artículo, los drones son utilizados para el control, manipulación y limpieza de materiales nocivos o contaminantes. En el caso de desastres acontecidos en centrales nucleares como el ocurrido en Fukushima, Japón, y deban limpiarse los materiales radiactivos liberados al aire, los drones podrían cumplir con esta responsabilidad sin comprometer de modo alguno la vida humana. Lamentablemente para la fecha en que ocurrió el desastre en Japón, esta tecnología todavía no estaba muy desarrollada, sin embargo se han utilizado drones como el T-Hawk para tomar fotografías del estado en que se encontraban los reactores. Una de las tecnologías que más destacan y llaman la atención de todos en estos últimos años son los llamados drones, pequeños aparatos voladores no tripulados y que pueden ser controlados en forma remota. Obviamente que un dispositivo de estas características sorprendería a cualquiera que alzase su cabeza y lo viera sobrevolando la ciudad presto a la entrega de un paquete o realizando tareas de vigilancia, todo un digno espectáculo de ciencia ficción, que no es para nada ficción.
Una de las tecnologías que más destacan y llaman la atención de todos en estos últimos años son los llamados drones, pequeños aparatos voladores no tripulados y que pueden ser controlados en forma remota. Obviamente que un dispositivo de estas características sorprendería a cualquiera que alzase su cabeza y lo viera sobrevolando la ciudad presto a la entrega de un paquete o realizando tareas de vigilancia, todo un digno espectáculo de ciencia ficción, que no es para nada ficción.