 Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexion USB.
Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexion USB.
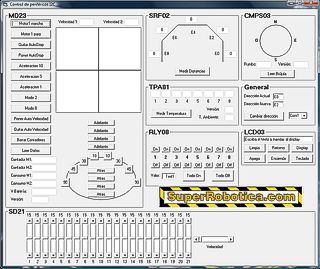
Lo primero que hay que tener claro es que lo que tratamos de hacer es un ejemplo de como controlar diferentes circuitos y sensores desde nuestro PC, para ello hemos seleccionado algunos de los componentes mas populares en los robots y hemos realizado un programa modular en que se muestra como se controla todo. Los circuitos que incluye el robot son:
SRF02 Sensor de ultrasonidos simple (compatible con el SRF08 y el SRF10)
 La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada mas, etc. En nuestro caso hemos puesto los necesario para que nuestro prototipo esté lo mas completo posible.
La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada mas, etc. En nuestro caso hemos puesto los necesario para que nuestro prototipo esté lo mas completo posible.
Una particularidad de todos los circuitos anteriores es que todos tienen conexión I2C que es una conexion tipo bus que solo necesita 2 hilos para interconectar todos los circuitos entre si. Todos los circuitos actúan como esclavos de un circuito principal llamado Master que es el que controlamos desde el PC y que en este caso se trata del circuito USBI2C. El master es el circuito que siempre inicia la conversación con el resto de los módulos, los esclavos, que lo que hacen es obedecer y contestar a las peticiones que hace el modulo master o principal.
 De igual forma si lo que queremos es utilizar un solo componente y conectarlo al PC, necesitaremos utilizar el componente elejido junto con el circuito USBI2C. Por ejemplo si queremos conectar un display LCD03 al pc por USB, lo que hacemos es conectar el display al circuito USBI2C y luego este al PC mediante un cable USB. Para controlarlo utilizaremos el programa proporcionado en este ejemplo o directamente extraemos la parte que nos interesa y hacemos nuestro propio programa según nuestras necesidades ya que se incluye el programa fuente del mismo.
De igual forma si lo que queremos es utilizar un solo componente y conectarlo al PC, necesitaremos utilizar el componente elejido junto con el circuito USBI2C. Por ejemplo si queremos conectar un display LCD03 al pc por USB, lo que hacemos es conectar el display al circuito USBI2C y luego este al PC mediante un cable USB. Para controlarlo utilizaremos el programa proporcionado en este ejemplo o directamente extraemos la parte que nos interesa y hacemos nuestro propio programa según nuestras necesidades ya que se incluye el programa fuente del mismo.
No hay comentarios.:
Publicar un comentario